在proteus 8.10和开发板上试验了19264液晶屏的显示。
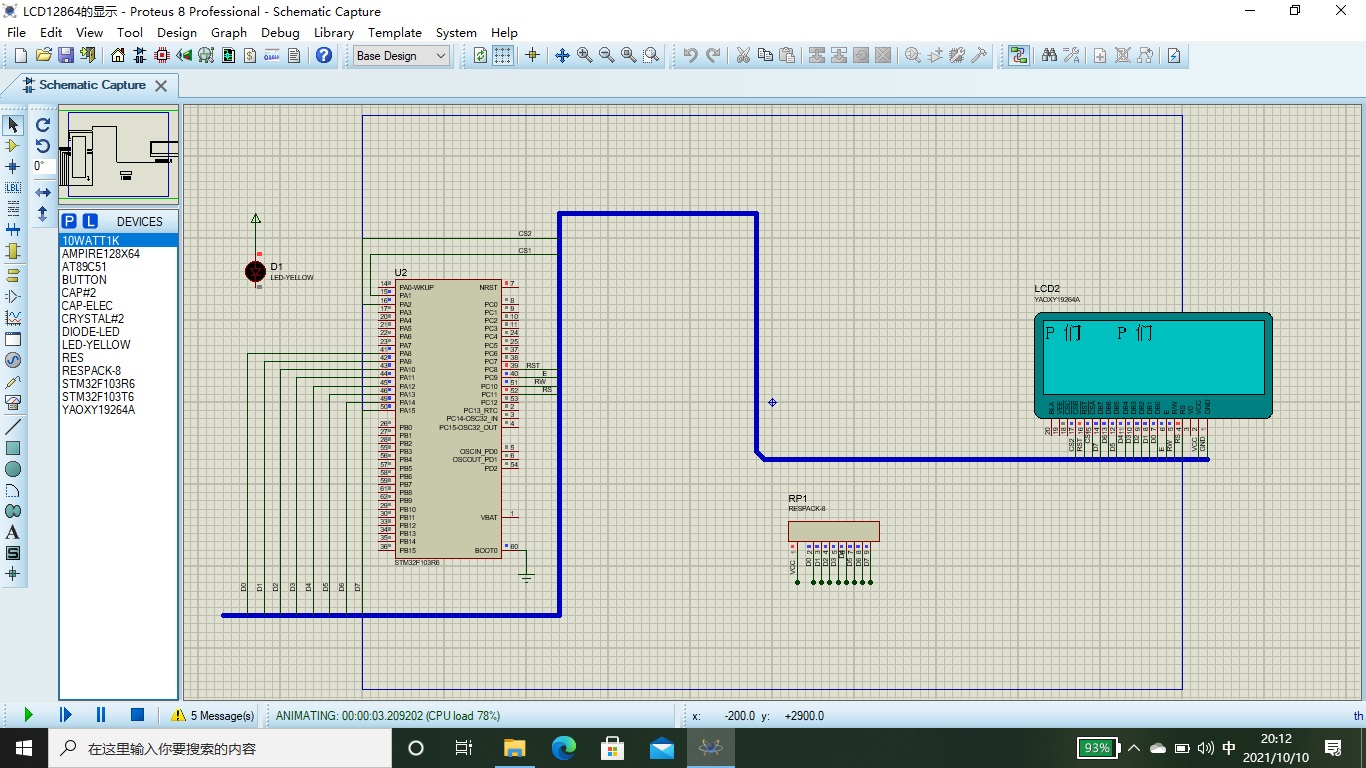
Proteus的原理图:
Proteus下的源代码。
至此试验就告完成。用过仿真软件Proteus和编译器Keil MDK5,表示谢意。
源文件打包在此:stm32_19264_proteus.zip。
开发板上的源文件打包在此:stm32_19264_board_3.zip。
开发中小结一些经验:
(1)Proteus仿真改变GPIO引脚;
(2)除了ks0108和st7920,内核AIP31108电源 2.7V~5.5V,不能靠USB供电,要用实际开发板外部电源;
(3)去掉串口printf打印;
(4)屏插座接触松动也会造成显示不良;
(5)调试经验:一步一步调试。
Proteus下的源代码。
main.c:
#include "stm32f10x.h"
#include "stdio.h"
#include "string.h"
/*
GPIO :
*/
#define RCC_APB2ENR *(uint32_t*)(0x40021000+0x18)
#define RCC_APB1ENR *(uint32_t*)(0x40021000+0x1C)
#define GPIOC_CRH *(uint32_t*)(0x40011000+0x04)
#define GPIOC_ODR *(uint32_t*)(0x40011000+0x0C)
#define GPIOB_CRL *(uint32_t*)(0x40010C00+0x00)
#define GPIOB_ODR *(uint16_t*)(0x40010C00+0x0C)
#define GPIOB_BSRR *(uint16_t*)(0x40010C00+0x10)
#define SETENA_ISER0 *(uint32_t*)(0xe000E100+0x00)
#define EXTI_IMR *(uint32_t*)(0x40010400+0x00)
#define EXTI_RTSR *(uint32_t*)(0x40010400+0x08)
#define EXTI_FTSR *(uint32_t*)(0x40010400+0x0C)
#define EXTI_PR *(uint32_t*)(0x40010400+0x14)
#define AFIO_EXTICR2 *(uint32_t*)(0x40010000+0x0C)
#define GPIOA_IDR *(uint32_t*)(0x40010800+0x08)
#define GPIOA_ODR *(uint32_t*)(0x40010800+0x0C)
#define GPIOA_CRH *(uint32_t*)(0x40010800+0x04)
#define SETENA_ISER1 *(uint32_t*)(0xe000E100+0x04)
//#define USART1_BASE *(uint32_t*)(0x40013800+0x00) //bug : redefinition
#define USART1_SR *(uint32_t*)(0x40013800+0x00)
#define USART1_DR *(uint32_t*)(0x40013800+0x04)
#define USART1_BRR *(uint32_t*)(0x40013800+0x08)
#define USART1_CR1 *(uint32_t*)(0x40013800+0x0C)
#define USART1_CR2 *(uint32_t*)(0x40013800+0x10)
#define USART1_CR3 *(uint32_t*)(0x40013800+0x14)
#define TIM1_CR1 *(uint32_t*)(0x40012c00+0x00)
#define TIM1_DIER *(uint32_t*)(0x40012c00+0x0C)
#define TIM1_SR *(uint32_t*)(0x40012c00+0x10)
#define TIM1_PSC *(uint32_t*)(0x40012c00+0x28)
#define TIM1_ARR *(uint32_t*)(0x40012c00+0x2C)
#define TIM3_CR1 *(uint32_t*)(0x40000400+0x00)
#define TIM3_DIER *(uint32_t*)(0x40000400+0x0C)
#define TIM3_SR *(uint32_t*)(0x40000400+0x10)
#define TIM3_PSC *(uint32_t*)(0x40000400+0x28)
#define TIM3_ARR *(uint32_t*)(0x40000400+0x2C)
unsigned char table_zf[] =
{
0x08, 0xf8, 0x08, 0x08, 0x08, 0x08, 0xf0, 0x00, 0x20, 0x3f, 0x21, 0x01, 0x01, 0x01, 0x00, 0x00
} ;
unsigned char table_hz[] = {
0x40, 0x20, 0xf8, 0x07, 0x00, 0xf8, 0x02, 0x04, 0x08, 0x04, 0x04, 0x04, 0x04, 0xfe, 0x04, 0x00,
0x00, 0x00, 0xff, 0x00, 0x00, 0xff, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x80, 0x7f, 0x00, 0x00
};
typedef unsigned int uint32_t;
void delay_us(uint32_t n)
{
SysTick->LOAD = 72*n;
SysTick->CTRL = 0x00000005;
while(!(SysTick->CTRL & 0x00010000))
;
SysTick->CTRL = 0x00000004;
}
#if 0
void busy()
{
int i;
uint8_t busy = 1;
GPIO_InitTypeDef GPIO_InitStruct;
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1 |GPIO_Pin_2 |GPIO_Pin_3 |
GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6 |GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
while(busy)
{
//rs = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_11,Bit_RESET);
//rw = 1;
GPIO_WriteBit(GPIOC,GPIO_Pin_10,Bit_SET);
//e = 1
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_SET);
// for(i = 0; i < 10000; i++)
// ;
busy = GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_7);
//e = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_RESET);
}
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1 |GPIO_Pin_2 |GPIO_Pin_3 |
GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6 |GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
}
#else
void busy()
{
delay_us(10000);
}
#endif
void send_cmd(unsigned char data)
{
int i;
unsigned char data2 = 0;
{
data2 = (((data & 0x01) >> 0)<< 7 ) ;
data2 |= (((data & 0x02) >> 1)<< 6 ) ;
data2 |= (((data & 0x04) >> 2)<< 5 ) ;
data2 |= (((data & 0x08) >> 3)<< 4 ) ;
data2 |= (((data & 0x10) >> 4)<< 3 ) ;
data2 |= (((data & 0x20) >> 5)<< 2 ) ;
data2 |= (((data & 0x40) >> 6)<< 1 ) ;
data2 |= (((data & 0x80) >> 7) << 0 ) ;
}
busy();
//rs = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_11,Bit_RESET);
//rw = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_10,Bit_RESET);
//bus0 = cmd;
// for(i = 0; i < 8; i++)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_8,(data & 0x1) >> 0);
GPIO_WriteBit(GPIOA,GPIO_Pin_9,(data & 0x2) >> 1);
GPIO_WriteBit(GPIOA,GPIO_Pin_10,(data & 0x4) >> 2);
GPIO_WriteBit(GPIOA,GPIO_Pin_11,(data & 0x8) >> 3);
GPIO_WriteBit(GPIOA,GPIO_Pin_12,(data & 0x10) >> 4);
GPIO_WriteBit(GPIOA,GPIO_Pin_13,(data & 0x20) >> 5);
GPIO_WriteBit(GPIOA,GPIO_Pin_14,(data & 0x40) >> 6);
GPIO_WriteBit(GPIOA,GPIO_Pin_15,(data & 0x80) >> 7);
// while(1)
// ;
//GPIOC->ODR &= 0xffffff00;
//GPIOC->ODR |= data2;
//GPIOC->ODR = 0x55; //RST????
}
//delay
delay_us(10);
//e = 1
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_SET);
delay_us(10);
//e = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_RESET);
}
void send_data(unsigned char data)
{
int i;
unsigned char data2 = 0;
{
data2 = (((data & 0x01) >> 0)<< 7 ) ;
data2 |= (((data & 0x02) >> 1)<< 6 ) ;
data2 |= (((data & 0x04) >> 2)<< 5 ) ;
data2 |= (((data & 0x08) >> 3)<< 4 ) ;
data2 |= (((data & 0x10) >> 4)<< 3 ) ;
data2 |= (((data & 0x20) >> 5)<< 2 ) ;
data2 |= (((data & 0x40) >> 6)<< 1 ) ;
data2 |= (((data & 0x80) >> 7) << 0 ) ;
//data = data2;
}
busy();
//rs = 1
GPIO_WriteBit(GPIOC,GPIO_Pin_11,Bit_SET);
//rw = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_10,Bit_RESET);
//bus0 = data;
// for(i = 0; i < 8; i++)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_8,(data & 0x1) >> 0);
GPIO_WriteBit(GPIOA,GPIO_Pin_9,(data & 0x2) >> 1);
GPIO_WriteBit(GPIOA,GPIO_Pin_10,(data & 0x4) >> 2);
GPIO_WriteBit(GPIOA,GPIO_Pin_11,(data & 0x8) >> 3);
GPIO_WriteBit(GPIOA,GPIO_Pin_12,(data & 0x10) >> 4);
GPIO_WriteBit(GPIOA,GPIO_Pin_13,(data & 0x20) >> 5);
GPIO_WriteBit(GPIOA,GPIO_Pin_14,(data & 0x40) >> 6);
GPIO_WriteBit(GPIOA,GPIO_Pin_15,(data & 0x80) >> 7);
//GPIOC->ODR &= 0xffffff00;
//GPIOC->ODR |= data2;
}
//delay
delay_us(10);
//e = 1
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_SET);
delay_us(10);
//e = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_9,Bit_RESET);
}
void select(int cs)
{
if(cs == 0)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_1,Bit_RESET); //cs1 = 1;
GPIO_WriteBit(GPIOA,GPIO_Pin_2,Bit_RESET); //cs2 = 1;
}
else if(cs == 1)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_1,Bit_RESET); //cs1 = 1;
GPIO_WriteBit(GPIOA,GPIO_Pin_2,Bit_SET); //cs2 = 0;
}
else if(cs == 2)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_1,Bit_SET); //cs1 = 0;
GPIO_WriteBit(GPIOA,GPIO_Pin_2,Bit_RESET); //cs2 = 1;
}
else
{
GPIO_WriteBit(GPIOA,GPIO_Pin_1,Bit_SET); //cs1 = 0;
GPIO_WriteBit(GPIOA,GPIO_Pin_2,Bit_SET); //cs2 = 1;
}
}
#define lcdrow 0xc0
#define lcdpage 0xb8
#define lcdcol 0x40
void lcd_init()
{
int i, j;
GPIO_InitTypeDef GPIO_InitStruct;
//GPIO_WriteBit(GPIOC,GPIO_Pin_14,Bit_SET);
// GPIOC_CHR 配置外设时钟使能寄存器
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStruct.GPIO_Pin =
GPIO_Pin_8 |GPIO_Pin_9 |GPIO_Pin_10 |GPIO_Pin_11;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2 |
GPIO_Pin_8 |GPIO_Pin_9 |GPIO_Pin_10 |GPIO_Pin_11 |
GPIO_Pin_12 |GPIO_Pin_13 |GPIO_Pin_14 |GPIO_Pin_15;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////
//select(0);
select(0);
//rst = 0;
GPIO_WriteBit(GPIOC,GPIO_Pin_8,Bit_RESET);
//delay 10ms
delay_us(10000);
//rst =1;
GPIO_WriteBit(GPIOC,GPIO_Pin_8,Bit_SET);
//clear
#if 1
//select(0);
select(0);
send_cmd(0xb8);
send_cmd(0x40);
/*
for(i = 0; i < 2; i++)
{
for( j =0; j < 16; j++)
{
send_cmd(lcdpage+i);
send_cmd(lcdcol +j);
send_data(table_hz[j+i*16]);
}
}
*/
/*
for(i = 0; i < 8; i++)
{
send_cmd(i + lcdpage);
send_cmd(lcdcol);
for( j = 0; j < 64; j++)
send_data(0x00);
}
*/
#endif
send_cmd(lcdrow);
send_cmd(lcdcol);
send_cmd(lcdpage);
send_cmd(0x3f);
// while(1)
// ;
}
int main()
{
int i,j;
lcd_init();
for(i = 0; i < 2; i++)
for( j =0; j < 8; j++)
{
send_cmd(lcdpage+i);
send_cmd(lcdcol +j);
send_data(table_zf[j+i*8]);
}
for(i = 0; i < 2; i++)
{
for( j =0; j < 16; j++)
{
send_cmd(lcdpage+i);
send_cmd(lcdcol +j + 16);//send_cmd(lcdcol +j);
send_data(table_hz[j+i*16]);
}
}
while(1)
;
return 0;
}
至此试验就告完成。用过仿真软件Proteus和编译器Keil MDK5,表示谢意。
源文件打包在此:stm32_19264_proteus.zip。
开发板上的源文件打包在此:stm32_19264_board_3.zip。
开发中小结一些经验:
(1)Proteus仿真改变GPIO引脚;
(2)除了ks0108和st7920,内核AIP31108电源 2.7V~5.5V,不能靠USB供电,要用实际开发板外部电源;
(3)去掉串口printf打印;
(4)屏插座接触松动也会造成显示不良;
(5)调试经验:一步一步调试。

